
Constraints allow you to add behaviors to the final transformation of an object or a skeleton bone. They range from tracking, interpolation to kinematic and a lot more learn below the capabilities of each of them to find the one that will fit into your active project.
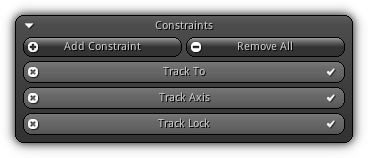
Add Constraint: Create a new constraint of a specific type. Once added the constraint entry will be added to the constraint list (as shown in the screenshot above). To delete a constraint press the ![]() icon located on the left side of its respective slot box. At any time you can enable or disable the effect of a constraint by press the
icon located on the left side of its respective slot box. At any time you can enable or disable the effect of a constraint by press the ![]() button located on the right side of the constraint entry in the list.
button located on the right side of the constraint entry in the list.
Remove All: Remove all existing constraints.
Common Settings
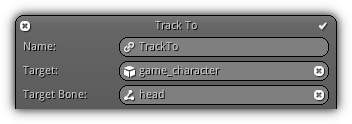
Name: A unique name to identify the constraint for the active object.
Target: Available in almost all constraint types the target represent the destination object the active constraint should be pulling information from. To select a target press the ![]() icon; this action will populate the list of all objects available. To cancel your selection press the
icon; this action will populate the list of all objects available. To cancel your selection press the ![]() button.
button.
Bone: If the Target specified is of the type SkeletalMesh and a skeleton is actually connected to it; the constraint can use a bone transformation instead of the default target one. Press the ![]() icon to display the list of all active bone for the targeted skeletal mesh. Press an entry to confirm; to cancel the bone connection push the
icon to display the list of all active bone for the targeted skeletal mesh. Press an entry to confirm; to cancel the bone connection push the ![]() button.
button.

Override: Determine if the constraints should override physics. If enabled the transform constraint calculation will be evaluated after the physics transform have been applied.

Local Space: Found in many constraint types this parameter specifies if the constraint should be calculated in local space (enabled) or world space (disabled).

Influence: All constraints are equipped with an influence that represent the weight of the constraint.
Constraint Types
| Type | Description | ||
|---|---|---|---|
Track To | Align the active transformation to point a specific target using custom axes. | ||
Track Axis | Align the rotational matrix of the active transformation to track a target limited to a single axis (billboard inverse). | ||
Track Lock | Track and lock the rotational axis of the active object. | ||
Track Target | Align the active rotational matrix to look at a specific target. | ||
Track ObjectGroup | Modify the active rotational matrix to look at a specific object group. | ||
Clamp Location | Limit the location of the active transformation. | ||
Clamp Rotation | Limit the rotation (Euler angles) of the active transformation. | ||
Clamp Quaternion | Limit the quaternion of the active transformation to a specific range. | ||
Clamp Scale | Limit the scale of the active transformation. | ||
Clamp Distance | Limit the distance between the active transformation and a specific target. | ||
Clamp Middle | Limit the location to be in between two targets. | ||
Proportional | Scale evenly the transformation on each axis. | ||
Copy Location | Assign the target location to the constraint owner transformation. | ||
Copy Rotation | Assign the target rotation to the constraint owner transformation. | ||
Copy Quaternion | Assign the target quaternion (3x3 matrix) to the constraint owner transformation. | ||
Copy Scale | Assign the target scale to the constraint owner transformation. | ||
Copy Transform | Assign the target transformation to the constraint owner transformation. | ||
Set Location | Set a specific location to the active transformation. | ||
Set Rotation | Assign a rotation (in Euler angles) to the active transformation. | ||
Set Quaternion | Set the rotation of the active transformation using quaternion. | ||
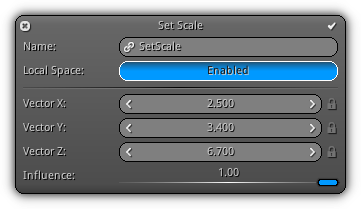
Set Scale | Specify a scale to assign to the active transformation. | ||
Offset Location | Add a location offset to the active object transformation. | ||
Offset Rotation | Add a rotation (Euler angles) offset to the active object transformation. | ||
Offset Quaternion | Add a quaternion rotation offset to the active object transformation. | ||
Offset Scale | Add a scale offset to the active object transformation. | ||
Offset Direction | Add a directional offset distance to the active transformation using a target. | ||
Billboard Align | Align the active object to constantly face a specific target. | ||
Acceleration Align | Align the active object transform (rotational matrix) based on its active acceleration. | ||
Follow Route | Force the object to follow a path set to an existing route object. | ||
Follow Rail | Clamp the location of the active object to the nearest point determined by an existing route object. | ||
Follow Limits | Restrict the location of the active object to interact within a defined enclosure determined by an existing route object. | ||
Lerp Location | Interpolate the active object location. | ||
Lerp Rotation | Interpolate the active object rotation. | ||
Lerp Scale | Interpolate the active object scale. | ||
Lerp Acceleration | Interpolate the active object acceleration. | ||
Inverse Kinematic | Control a chain of bones by specifying the start and end target. | ||
Elliptic | Orbit the active transformation around a predefined target. | Ortho. Anchor | Anchor the active object transformation to a camera orthographic edge. |
Track To
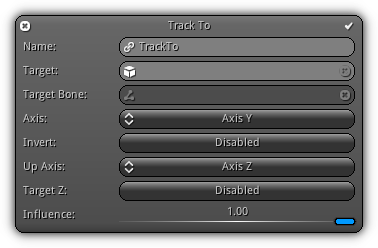
Align the active object transformation to point a specific target using custom axes.
Axis: The axis to track relative to the target object.
Invert: Invert the direction vector between the source and the target.
Up Axis: Specify the up axis to calculate the final tracking matrix.
Target Z: Use the target up rotation as the up axis.
Track Axis

Align the rotational matrix of the active object transformation to track a target limited to a single axis (billboard inverse).
Axis: On which axis the source should track the target.
Invert: If enabled the Axis specified will become negative (ie. X as -X).
Track Lock
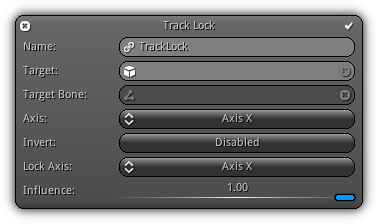
Track and lock the rotational axis of the active object.
Axis: The axis to track the target.
Invert: If enabled the Axis specified will become negative (ie. X as -X).
Lock Axis: The axis to lock the target.
Track Target

Align the active object rotational matrix to look at a specific target.
Track ObjectGroup

Modify the active object rotational matrix to look at a specific object group.
Group: The object group the constraint should track. Press the ![]() to display the list of all available groups. Press an entry to select; to cancel your selection hit the
to display the list of all available groups. Press an entry to select; to cancel your selection hit the ![]() .
.
Tracking: Specify the tracking system to use. Choose between Group Center which will use the center of the AABB of the group. Object Bounds will determine which objects radius are larger, and consequently put more emphasis on the bigger objects. Object Priority works the same as the previous at the exception it does not use the radius but object priorities set by the user.
Clamp Location
Limit the location of the active object transformation.
Min. XYZ: Specify the lower edge of the clamp function. To unlock a specific axis allowing you to set a lower bound value press the ![]() .
.
Max. XYZ: Specify the upper edge of the clamp function. To unlock a specific axis allowing you to set an upper bound value press the ![]() .
.
Clamp Rotation
Limit the rotation (Euler angles) of the active object transformation.
Min. XYZ: Specify the lower edge of the clamp function. To unlock a specific axis allowing you to set a lower bound angle press the ![]() .
.
Max. XYZ: Specify the upper edge of the clamp function. To unlock a specific axis allowing you to set an upper bound angle press the ![]() .
.
Clamp Quaternion
Limit the quaternion of the active object transformation to a specific range.
Min. XYZW: Specify the lower quaternion edge of the clamp function. To unlock a specific component press the ![]() .
.
Max. XYZW: Specify the upper quaternion edge of the clamp function. To unlock a specific component press the ![]() .
.
Clamp Scale
Limit the scale of the active object transformation.
Min. XYZ: Specify the lower edge of the clamp function. To unlock a specific axis allowing you to set a lower bound scale value press the ![]() .
.
Max. XYZ: Specify the upper edge of the clamp function. To unlock a specific axis allowing you to set an upper bound scale value press the ![]() .
.
Clamp Distance
Limit the distance between the active object and a specific target.
Min. Distance: The minimum distance the source should keep staying away from the target.
Max. Distance: Determine the maximum distance between the source and the target.
Clamp Middle
Limit the location to be in between two targets.
Equilibrium: Determine the equilibrium point to create tension which will for the center to point toweard either targetA (-1) or targetB (+1).
Proportional

Scale evenly the object transformation on each axis.
Lowest: Specify if the constraint should scale the source proportionally based on the lower scale (enabled) or highest scale (disabled).
Copy Location
Assign the target location to the constraint owner transformation.
Copy Rotation
Assign the target rotation to the constraint owner transformation.
Copy Quaternion
Assign the target quaternion (3x3 matrix) to the constraint owner transformation.
Copy Scale
Assign the target scale to the constraint owner transformation.
Copy Transform
Assign the target transformation to the constraint owner transformation.
Set Location

Vector XYZ: Specify the location to transmit to the active transformation on each axis. Control which axis will to set by unlocking it using the ![]() .
.
Set Rotation

Vector XYZ: Specify the Euler angle to apply on each axis of the active transformation. Control which rotational axis will be affected by unlocking it using the ![]() .
.
Set Quaternion
Quaternion XYZW: The quaternion to assign to the active transformation. Control which rotational axis will be affected by unlocking it using the ![]() .
.
Set Scale
Vector XYZ: The scale vector to be assigned to the active transformation. Control which axis will be set by unlocking it using the ![]() .
.
Offset Location

Offset XYZ: Specify the location offset for each axis.
Offset Rotation

Offset XYZ: Specify the offset for each axis in Euler angle.
Offset Quaternion
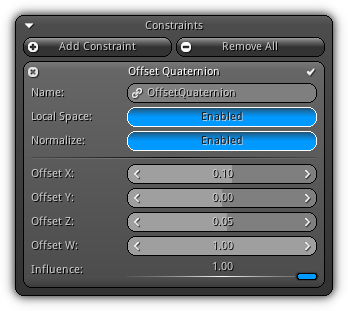
Offset XYZW: Specify the quaternion offset.
Offset Scale

Offset XYZ: Specify the scale offset for each axis.
Offset Direction
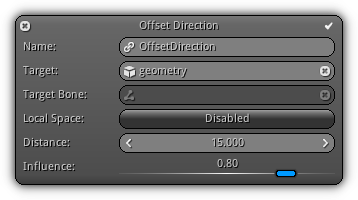
Distance: Specify the distance away from the active target.
Billboard Align
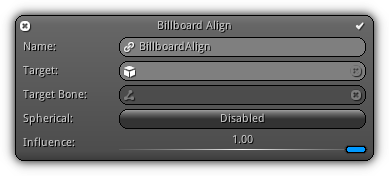
Sperical: Determine if the billboard should also take in consideration the forward axis of the target.
Acceleration Align
Rotation X: Determine if the source object should take in consideration the X rotational axis of its acceleration.
Rotation Z: Determine if the source object should take in consideration the Z rotational axis of its acceleration.
Follow Route

Target: Specify an existing route object to use; the active path of the object will be used to affect the location of the source. Press the ![]() to list all available route object; press an entry to select. To cancel; push the
to list all available route object; press an entry to select. To cancel; push the ![]() button.
button.
Interpolation: Specify the position to use along the path.
Follow Rail

Target: Specify which existing route object to use; the active path of the object will be used to affect the location of the source. Press the ![]() to list all available route object; press an entry to select. To cancel; push the
to list all available route object; press an entry to select. To cancel; push the ![]() button.
button.
Follow Limits

Target: Specify an existing route object to use; the active path of the object will be used to affect the location of the source. Press the ![]() to list all available route object; press an entry to select. To cancel; push the
to list all available route object; press an entry to select. To cancel; push the ![]() button.
button.
Weight: Determine the amount of attraction (in terms of percentage) the limits will have on the source object.
Lerp Location

Interpolate the active object location.
Interpolation: The interpolation ratio between the current and the next location.
Lerp Rotation

Interpolate the active object rotation.
Interpolation: The interpolation ratio between the current and the next rotation.
Lerp Scale

Interpolate the active object scale.
Interpolation: The interpolation ratio between the current and the next scale.
Lerp Acceleration

Interpolate the active object acceleration.
Interpolation: The interpolation ratio between the current and the next acceleration.
Inverse Kinematics
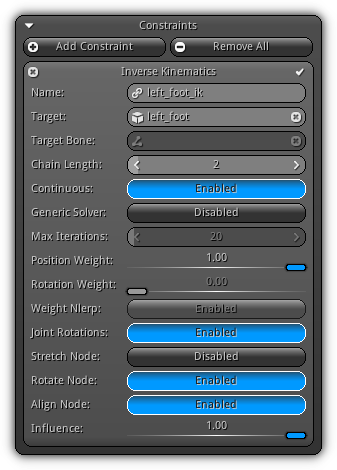
Chain Length: Specifies how many parent joints should be affected.
Continuous: Do not reset the tree each frame and reuse the previous frame as base.
Generic Solver: Force the use of the FABRIK solver. If this option is off and the chain length is either one or two an optimized solver for hands (1) or legs (2) will be used.
Max. Iterations: Specifies the maximum number of iterations. The more iterations, the more precise the result will be. The default value for the FABRIK (generic) solver is 20, but you can decent results with values as low as 3 or 5.
Position Weight: Specifies how much influence the solver has on the chain of joints. A value of 0 cause the solver to completely ignore the chain, while a value of 1 will force the solver to reach the target. Take note that this value can be used to script or animate a blend in/out animation.
Rotation Weight: Represents the influence of the target rotation. A value greater than 0 will enable target rotation solving as well as an interpolation (where 1 fully solves the rotational factor).
Tolerance: Controls the precision of the solver; a higher value will cause less iterations; while a lower (more precise) value will cause more solver iterations.
Weight NLERP: Use the NLERP algorithm to interpolate the transition of the chain of joints (only takes effect when the position weight value is less than 1.0).
Joint Rotation: Whence enabled joint rotation calculation will be calculated.
Stretch Node: Force the node attached to the effector to reach the target (at the cost of sometimes stretching the skin of the skeletal mesh).
Rotate Node: Force to node attached to the effector to be aligned with the target.
Elliptic
Angle X: Rotation angle on the X axis.
Angle Z: Rotation angle on the Z axis.
Distance: Specify the offset away from the target.
Orthographic Anchor
Target: The camera target to anchor the transformation.
Anchor: Determine the edge to attach to transformation to.
Value: The ammount of offset to apply relative to the anchor edge selected.
Relative: Determine if the value is a relative (ranging from 0.0 to 1.0) or an absolute offset.
|
|